DOBOT COBOT CR5S
Kollaboratív ipari robotkar SafeSkin kiegészítővel ellátva

A CR5S az ember-robot biztonságos együttműködésének kulcsa. A DOBOT SafeSkin kiegészítővel tervezett CR5S robotkar úgy lett kialakítva, hogy egyszerűsítse az automatizálási vonalakat és magas szintű biztonságot nyújtson az ember számára.
RUGALMAS TELEPÍTÉS, GYORS VÉGREHAJTÁS

Javítsa a munkafolyamat rugalmasságát és a termelés hatékonyságát egy könnyen telepíthető CR kollaboratív robot használatával, melyet mindössze 20 perc alatt össze tud állítani és akár 1 órán belül már használni is tud. Az irányító konzol bekötése és a robotkar rögzítése után, csupán össze kell kötnie a két eszközt, majd bekapcsolnia a rendszert.
KÖNNYEN HOZZÁFÉRHETŐ, EGYSZERŰEN ELSAJÁTÍTHATÓ

A Dobot szoftvere és számtani technológiája intelligensé és egyszerűvé teszi a CR kollaboratív robot sorozat működését és kezelését. A szoftvernek és a kézi betanításnak köszönhetően pontosan utánozhatja az emberi mozdulatokat. Nincs szükség programozási ismeretekre. Ezt elősegíti blokk alapú fejlesztői környezete, mely segítségével nincs szükség a bonyolult programozási könyvtárrendszerek és funkciók alkalmazásának megtanulására.
Abban az esetben ha rendelkezik előzetes programozói tudással, a robot rendszere támogatja a Python programozási nyelvet, így a robot minden előnyét kihasználhatja.
SafeSkin technológia – Az elektromágneses indukció hasznosítása
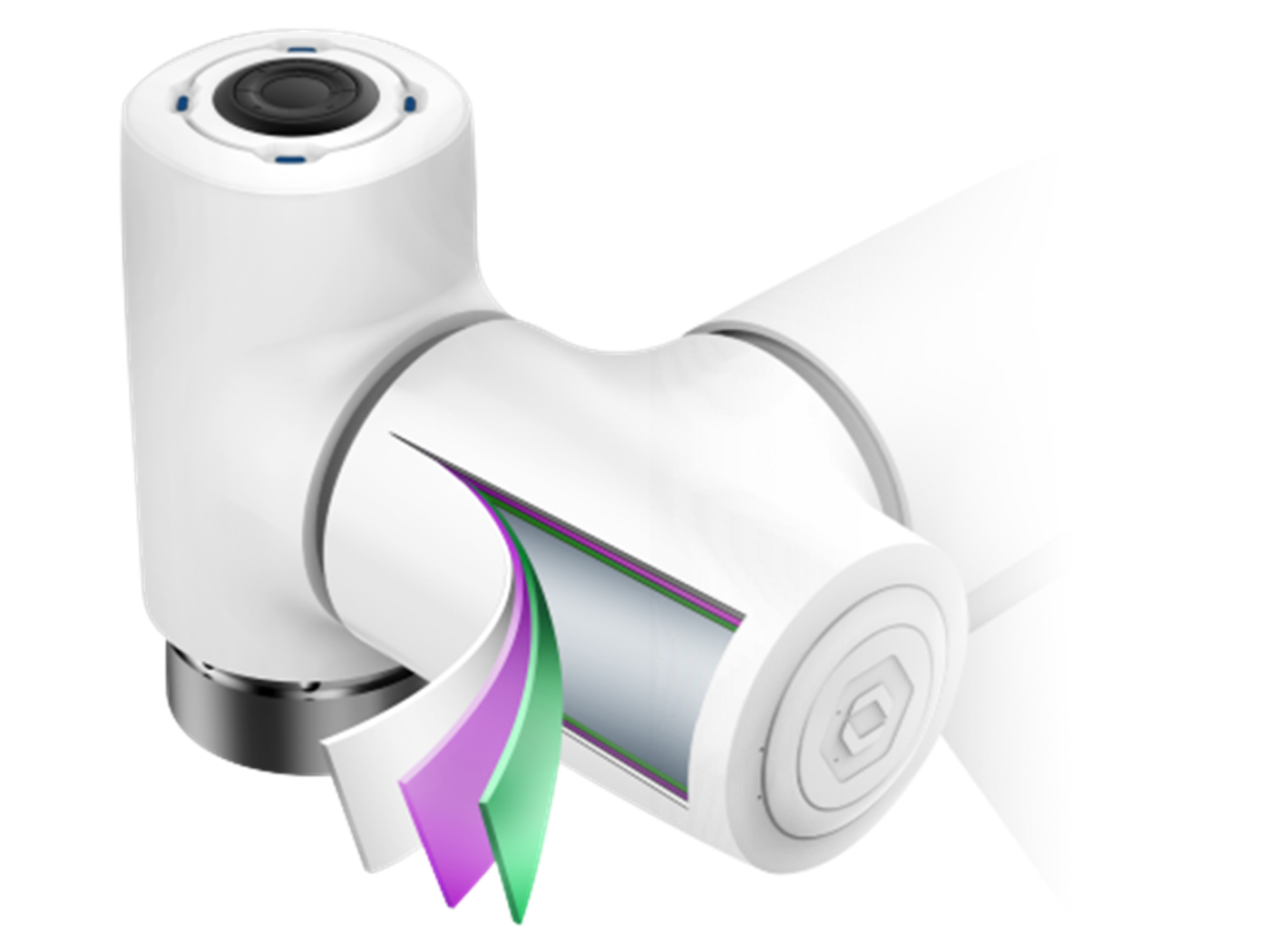
A DOBOT vállalat saját üzembiztonsági fejlesztése, mely segítségével a robotkar nem csupán megakadályozza a baleseteket, de meg is előzi azokat. Az elektromágneses indukció segítségével egy érzékelőkkel felszerelt szilikon borítás biztosítja a robot környezetre való figyelmét. A borítás a robot borítása mentén egy elektromágneses teret hoz létre, melyet minden környezetében lévő vagy mozgó idegen objektum megtör, ez által a szenzor jelet küld a robot központi feldolgozó egységének. Ennek köszönhetően a robot azonnal megáll.
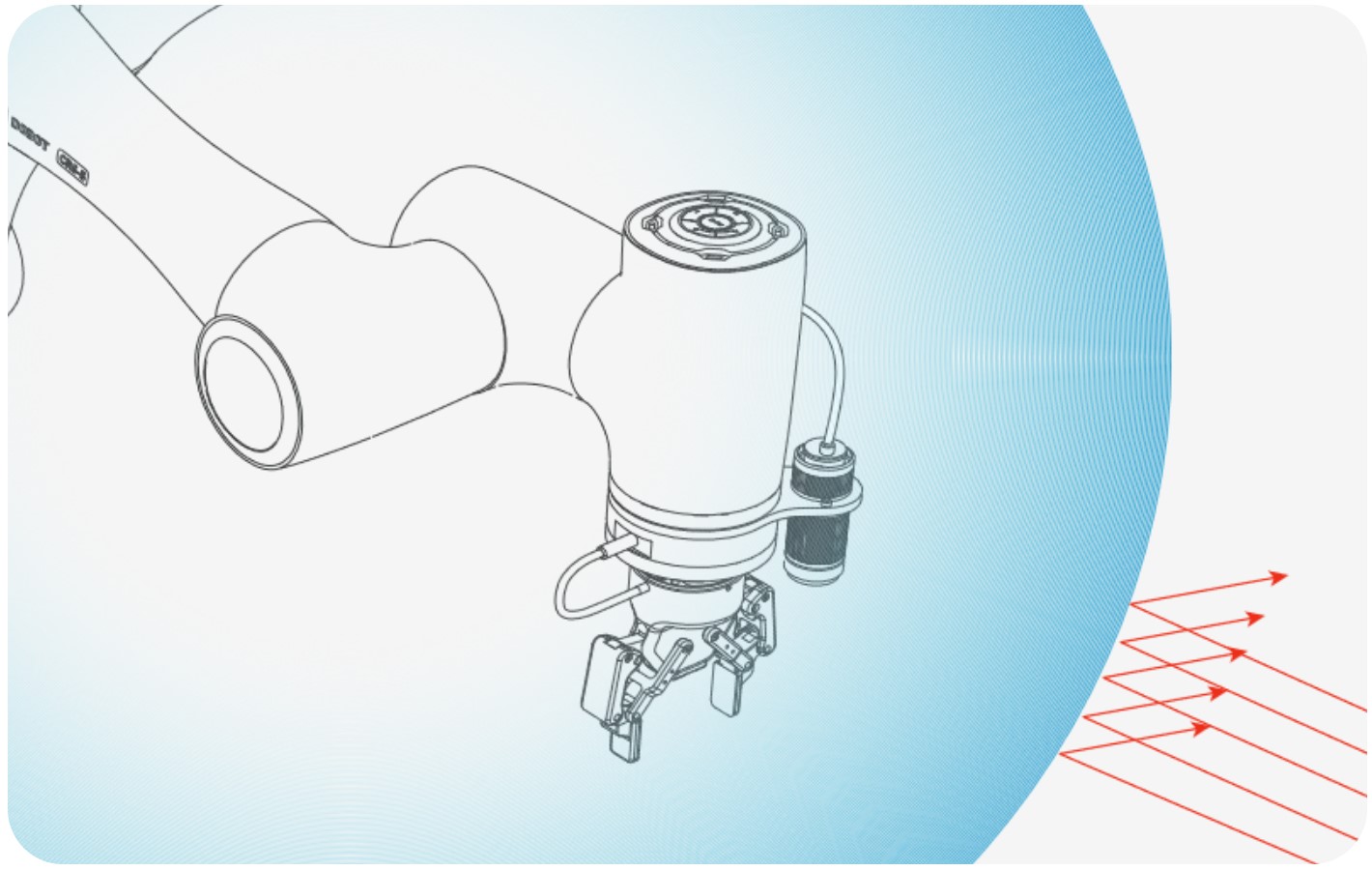
Működését egészen addig felfüggeszti, míg a mágneses tér integritása vissza nem áll, azaz az idegen objektum el nem hagyja a robot közvetlen környezetét. Miután a működési útvonala újra felszabadul, a robot automatikusan folytatja munkáját anélkül, hogy veszélyeztetné a gyártási folyamatot.
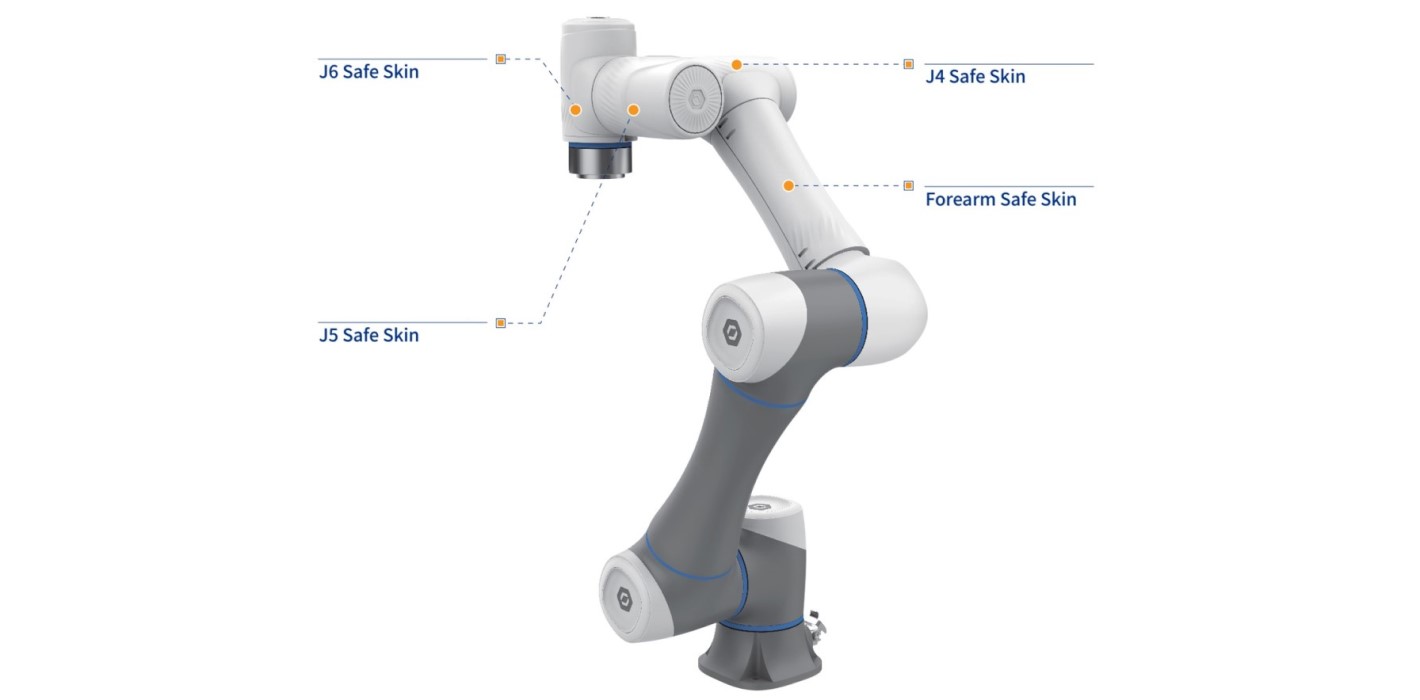
A SafeSkin csomag 4 egységnyi borítást foglal magában. Az alkar borítását, a J4 csukló borítását, a J5 csukló borítását, és a J6 csukló borítását.
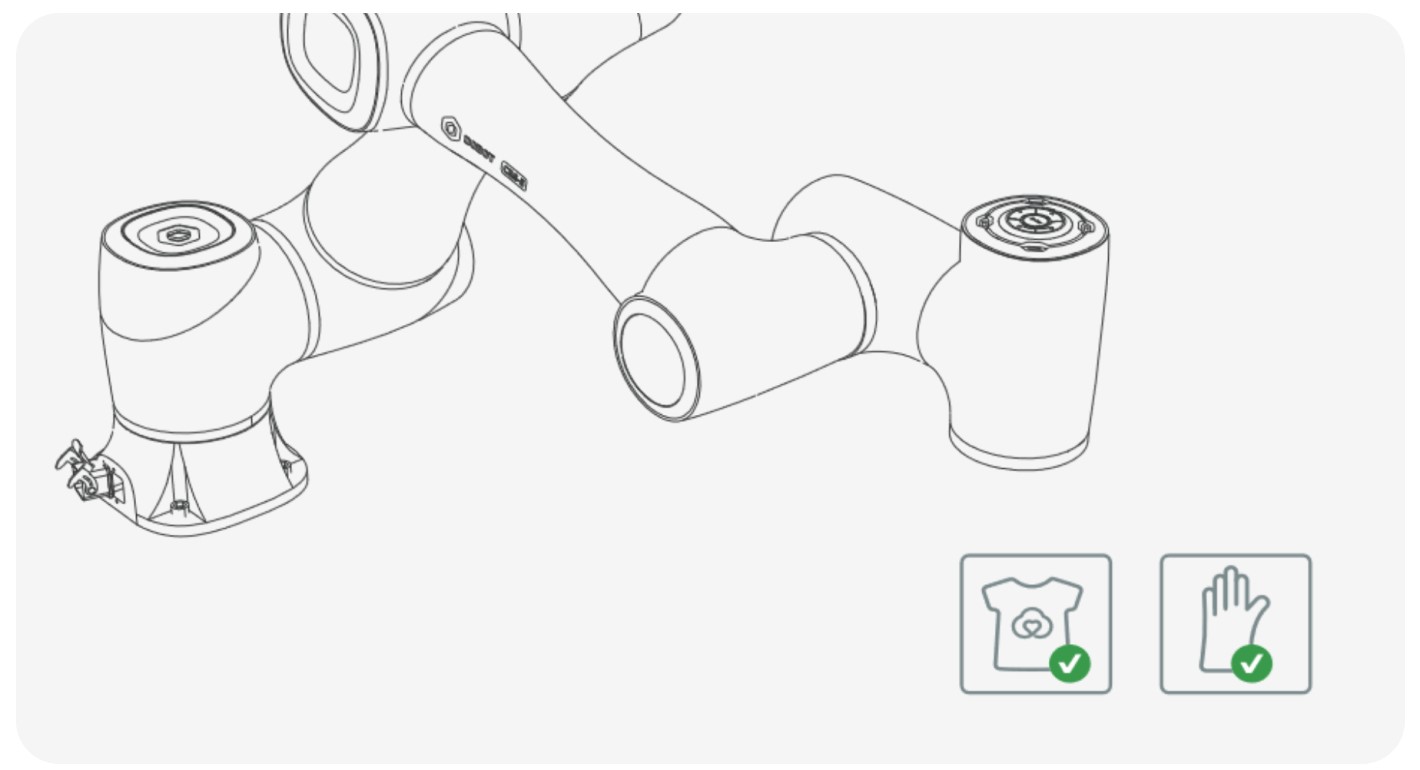
A különböző anyagokhoz mérten az érzékelés érzékenysége is változó szintű. Míg az emberi bőr a legmagasabb szinten helyezkedik el (A borítás erre a legérzékenyebb), a műanyag a legalacsonyabb. A megelőzéshez kötődő paramétereket, például gyorsulás, sebesség beállíthatóak, a robot fejlesztői programjában.
Biztos befektetés, kimagasló megbízhatóság

A CR kollaboratív robot kar széria erős és stabil építési minősége akár 32000 órányi élettartamot ígér, mindemellett alacsony üzemi költség is jellemzi. Ezáltal a CR széria tagjai nem csak biztos, hanem egyúttal megtérülő befektetések is.
Főbb jellemzői:
Terméknév |
DOBOT CR5S |
Súly |
25kg |
Maximum hasznos teher |
5kg |
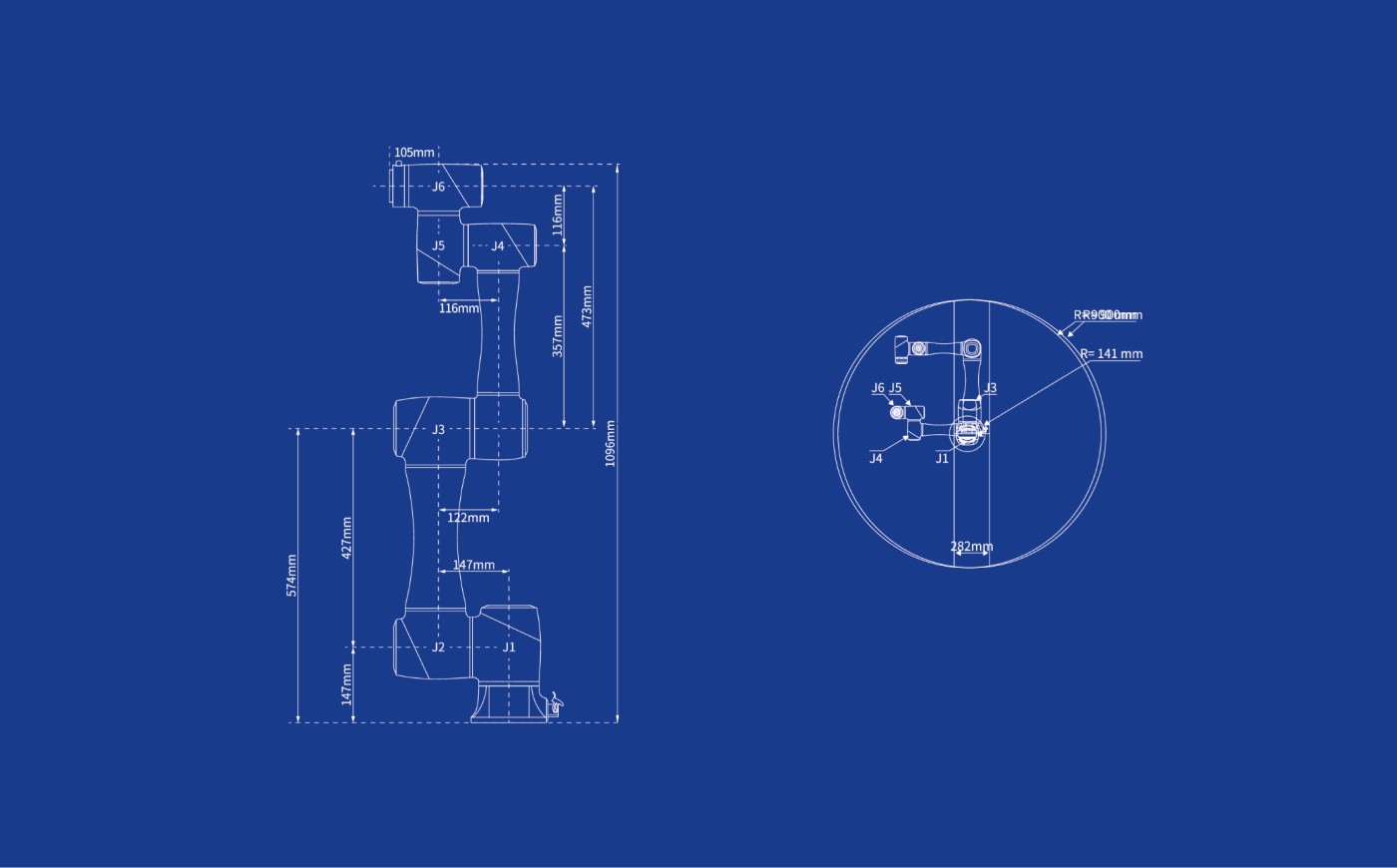
Maximum hatótáv |
900mm |
Névleges feszültség |
DC48V |
Maximum végszerszám sebesség |
3m/s |
Ízületek mozgástere |
J1 |
±360° |
J2 |
±360° |
J3 |
±160° |
J4 |
±360° |
J5 |
±360° |
J6 |
±360° |
Maximum ízületsebesség |
J1/J2 |
180°/s |
J3/J4/J5/J6 |
180°/s |
Végberendezés I/O interfésze |
DI/DO/AI |
2 |
AO |
0 |
Kommunikációs interfész |
Communication |
RS485 |
Vezérlő I/O |
DI |
16 |
DO/DI |
16 |
AI/AO |
2 |
ABZ Incremental Encoder |
1 |
Ismétlési pontosság |
±0.02mm |
Kommunikáció |
TCP/IP, Modbus, EtherCAT,WIFI |
IP Szabvány |
IP54 |
Üzemi hőmérséklet |
0~45° |
Teljesítmény |
150W |
Anyagok |
Aluminum alloy, ABS plastic |
Végszerszámok

A végszerszámok azok az eszközök, amelyek a robotok karjai végére szerelhetők. A DOBOT CR kollaboratív robot széria végszerszámok széles választékával kompatibilis, így a vállalkozások akár legspeciálisabb igényeinek is meg fog tudni felelni. Legyen az hegesztés, raklapozás, rakodás, csavarozás, szortírozás, összeszerelés, vagy minőség ellenőrzés, bármely folyamatra megtalálhatóak azok a vákuumos vagy elektronikus úton működő megfogók, kommunikációt és automatizálást segítő MODBUS egységek, vagy futószalag és vizuális egység kiegészítők, melyek segítségével a robotkar hatásfoka maximumát képes elérni, mint például:
- Csomagolás és raklapozás
- Kezelés
- Polírozás
- Csavarozás
- Ragasztás, adagolás és hegesztés
- Összeszerelés
- Gépkezelés
- CNC
- Minőség-ellenőrzés
- Fröccsöntés
Csomag Tartalma

A robotkar két egységből áll. Egy robotkarból, illetve a programozásához szükséges vezérlő egységből. A vérzlő egység egy számítógép, melyben a robotkar fejlesztői környezete található. A vezérlő rendelkezik azokkal az IO portokkal, melyekhez a különböző kiegészítők köthetőek, ezekkel együtt a vészleállító kapcsoló is
*A vészleállító kapcsoló megnyomásával a robot azonnal megáll működésében.
A két egység mellett a csomag tartalmazza az egységek tápkábeleit és az összekötéshez szükséges IO kábelt.
Ezek mellett a csomag tartalmazza a SafeSkin kiegészítőt is!
Robotkar mozgatásának módjai
A robotkar 4 módban képes két koordinátapontot összekötve eljutni A pontról B pontba:
Joint Interpolated Motion (Csukló interpolált mozgás): A mozgás GO és MoveJ programmal valósítható meg, melynek köszönhetően a végszerszám pozícióját nem figyelembe véve, a robotkar csuklói szögét interpolálva állítja át pozícióját A pontból B pontba
Linearly Interpolated Motion (Lineársan interpolált mozgás): A mozgás Move programmal valósítható meg, melynek köszönehtően a robot, égszerszáma helyzetét vizsgálva köti össze A pont és B pont koordinátáit, mely egyenesen végigvezeti a végszerszámot. A lineáris mozgás esetén megkülönböztethető a jump mód használata, mely során a végszerszám a két koordináta pontjait vagy végállásig mozgatja, vagy a pont koordinátáit figyelembe véve lekerekítést akalmaz a folyamatos mozgás kivitelezéséhez.
ARC -Circular Interpolated Motion (Körkörösen interpolált mozgás): A robot A és B pontokat egy C segédpont segítségével egy ív mentén köti össze, így egy íves mozgást végrehajtva, melynél a végszerszám pozícióját veszi figyelembe
Circle - Circular Interpolated Motion (Kör alakzatban interpolált mozgás): A robot A és B pontokat egy C segédpont segítségével összekötve egy kör alakzatot leírva végzi mozgását, a végszerszám pozícióját figyelembe véve
Koordináta rendszerek
A robotkar rendszer koordináta rendszere négy koordináta rendszerre van osztva:
Bázis koordináta rendszer: A bázis koordináta rendszere a végszerszám koordinátáit, pozícióját és mozgását határozza meg, a bázis koordináta rendszere alapján, melyet a derékszögű koordinátarendszer határoz meg.
Csukló koordináta rendszer: A csuklók koordináta rendszerét az egyes csuklók mozgái lehetőségi határozza meg
Végszerszám koordináta rendszere: Az eltolás távolságát és forgási szögét meghatározó koordináta-rendszer, amelynek origója és orientációi a robotlapon elhelyezkedő munkadarab helyzetétől függően változnak
Felhasználói koordináta rendszer: Mozgatható koordináta-rendszer, amelyet olyan berendezések, mint a berendezési tárgyak, munkapadok ábrázolására használnak. Az origó és a tengelyek tájolása a helyszíni követelmények alapján határozható meg, a munkaterületen belüli pontadatok mérése és a feladatok kényelmes elrendezése érdekében
Szingularitás pontok
Amikor a robot a kartéziánus koordinátarendszerben mozog, a két tengely eredő sebessége nem lehet bármelyik irányban, ha az irányok egy vonalban vannak, ami azt eredményezi, hogy a robot szabadságfokai romlanak.
A robot három szingularitás ponttal rendelkezik.
